










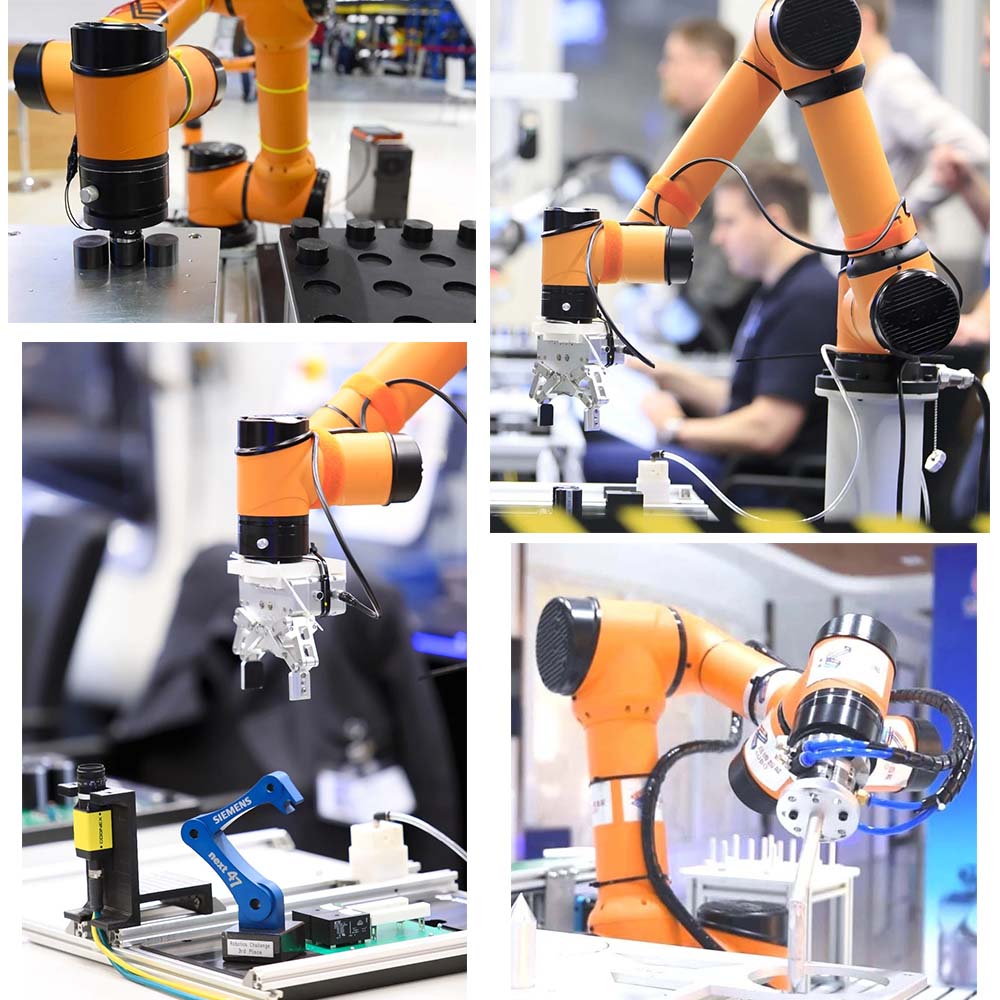
6-Achsen-Manipulator für Automatisierungssystem
Produktbeschreibung
6-Achsen-Manipulator für Automatisierungssystem
Zusammensetzung des Schmiedemanipulators
Betätigungsmechanismus: Er umfasst die Krallen, Handgelenke, Arme, Säulen und den Gehmechanismus.
1. Klaue
Es ist der Teil, der das Werkstück festklemmt, ähnlich der Klemme des Schmiedemanipulators. Die Form der Klemmklaue ähnelt der eines menschlichen Fingers mit Klemm- und Entspannungsvorgängen.
2. Handgelenk
Es ist ein Teil, das die Klaue und den Arm verbindet, die Klaue stützt und die Position des geklemmten Werkstücks im Raum einstellt. Das Handgelenk hat im Allgemeinen drei Bewegungen: Neigen, Schwingen nach links und rechts und Drehen um die eigene Achse. Einige Manipulatoren haben kein Handgelenk.
3. Arm
Es ist eine Komponente zur Unterstützung des geklemmten Werkstücks, der Krallen und des Handgelenks. Es kann das Werkstück entsprechend einer bestimmten Flugbahn im Raum von einer Position in eine andere bewegen. Im Allgemeinen hat der Arm Bewegungen wie Vorwärts- und Rückwärtsverlängerung, Auf- und Abheben, Links- und Rechtsdrehung sowie Auf- und Abschwingen.
4. Spalte
Es ist der Teil, der den Arm stützt. Die Säule des Manipulators ist normalerweise fest, manchmal aufgrund der Notwendigkeit, die Säule kann auch beweglich ausgelegt sein, was als bewegliche Säule bezeichnet wird.
5. Gehmechanismus
Wenn der Manipulator einen relativ langen Betrieb ausführen muss, kann ein Laufmechanismus wie Rollen und Führungsschienen an der Basis installiert werden, um die Bewegung der gesamten Maschine zu realisieren.
Intelligenz
1. Bildverarbeitungssysteme können in die Steuerung integriert werden.
2. Auf Cloud-Plattform-Management basierendes Softwaresystem, das Fernwartung, Fehlerdiagnose und Online-Aktualisierung der Firmware realisiert.
3. Diese Plattform für Forschungsroboter wird weltweit in Forschungslabors von Unternehmen und für die akademische Robotikforschung eingesetzt.
Modulares Design
1. Der Roboter kann so konfiguriert werden, dass er zwischen vier und sieben Freiheitsgrade hat, um die Benutzeranforderungen zu erfüllen.
2. Die Verbindungslänge kann an längere oder kürzere Glieder angepasst werden.
Neben der Roboterarmmaschine bietet unser Unternehmen auch zahlreiche Produkte an, darunter Lötdampfextraktor, Lötpastenspender, pneumatischer Handschneckenförderer und automatischer Schraubenförderer. Wenn Sie diese Produkte benötigen, können Sie uns kontaktieren, wir werden Ihnen so schnell wie möglich antworten.
Technische Spezifikationen
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety monitored stop, speed and separation monitoring, hand guid operation, power and force limiting design. |
| Certifications |
ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 ISO 12100:2010, ISO 13849-1:2008, CE |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python. |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | User I/O | Safety I/O | |
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | - | |
| Communication | TCP/IP, Modbus-RTU/TCP | Analog out | 4 | - | |
| Power supply | 100-240 VAC, 50-60Hz | Power input | 24 Volts | ||
| IP Classification | IP54 | Power output | 3A | ||



Produktgruppe : Roboterarmmaschine > Kingsom New Arrival Industrieller Schmiede-Manipulator-Roboterarm